Los investigadores de ETH Zurich y del Instituto Max Planck han desarrollado una pierna robótica que imita la estructura muscular de los animales.
FUENTE:lavanguardia.com
AUTOR:David Freire
En el mundo de la robótica se están poniendo de moda los robots humanoides y dos buenas pruebas de esta tendencia son el Neo Beta, un robot bípedo creado por la empresa noruega 1X en colaboración con ChatGPT que está diseñado para realizar las tareas domésticas y el Unitree H1 Evolution V3.0, un robot humanoide fabricado por la empresa robótica china Unitree que es capaz de andar a gran velocidad, bajar las escaleras de diferentes maneras e incluso bailar una coreografía con otros robots.
A pesar de ello, algunos científicos especializados en robots siguen trabajando en pequeños proyectos que les facilitan la vida a las personas con limitaciones físicas y una clara demostración de esto es que acabamos de conocer que unos investigadores han creado una pierna robótica que puede saltar y adaptarse a terrenos irregulares.
Una pierna robótica que emula los movimientos de los músculos
Recientemente, varios investigadores de ETH Zurich y del Instituto Max Planck han publicado un estudio en la revista Nature Communications en el que explican cómo han desarrollado una revolucionaria pierna robótica que utiliza músculos en lugar de motores eléctricos.
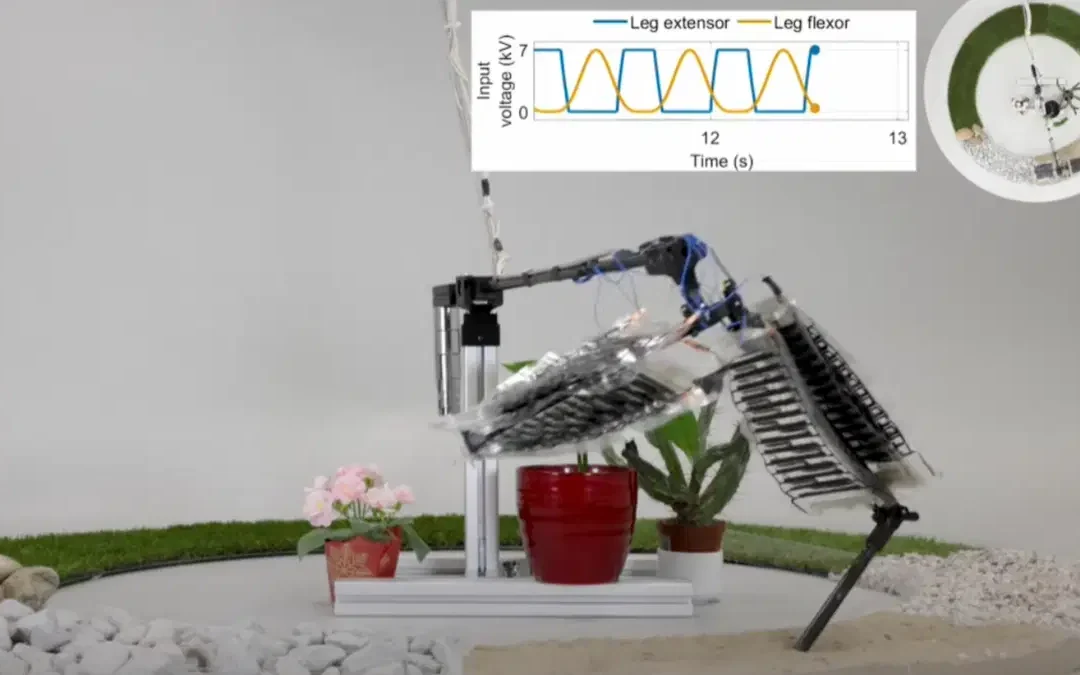
Así, estos científicos han conseguido crear una pierna robótica a pequeña escala que es capaz de imitar la estructura muscular de los animales, algo que le permite no solo realizar movimientos complejos como saltar, gracias a su capacidad para aumentar su peso explosivamente, sino también adaptarse a terrenos irregulares para evitar obstáculos como, por ejemplo, una piedra.
Robert Katzschmann, uno de los principales investigadores de ETH Zurich afirma que esta pierna robótica «musculoesquelética» puede ser la base del robot de rescate del futuro:
«Si combinamos la pierna robótica en un robot cuadrúpedo o un robot humanoide con dos patas, tal vez algún día, cuando funciona con batería, podamos implementarla como un robot de rescate»
Como han explicado los investigadores de ETH Zurich en un comunicado de prensa publicado por el medio EurekAlert!, esta innovadora pierna robótica se mueve utilizando músculos extensores y flexores artificiales y usando unos actuadores electrohidráulicos que están unidos al esqueleto robótico mediante tendones.
Asimismo, dichos actuadores no son más que bolsas de plástico llenas de aceite, muy similares a las que se usan para hacer cubitos de hielo, cada una de las cuales está cubierta parcialmente por ambos lados por un electrodo conductor negro.
En este sentido, Thomas Buchner, otro de los autores de este estudio, explica que una de las claves del funcionamiento de esta pierna robótica es la electricidad estática:
«Tan pronto como aplicamos un voltaje a los electrodos, se sienten atraídos entre sí debido a la electricidad estática. Del mismo modo, cuando froto un globo contra mi cabeza, mi cabello se pega al globo debido a la misma electricidad estática»
Así, el voltaje que llega a los electrodos determina el movimiento de la pierna robótica, ya que, a medida que aumenta el mismo, los electrodos se acercan, desplazando el aceite hacia el actuador y acortando la bolsa.
Por lo tanto, cuando los actuadores se emparejan con un esqueleto, estos imitan los movimientos musculares de las criaturas vivas contrayendo un músculo al mismo tiempo que se extiende otro.
Además, para controlar que actuadores se extienden o se contraen, esta pierna robótica utiliza un código informático y unos amplificadores de alto voltaje.
Finalmente, en lo que respecta a su autonomía, la pierna robótica diseñada por estos científicos es más eficiente energéticamente que una pierna estándar alimentada por un motor eléctrico, tal como explica Buchner en el citado comunicado de prensa:
«En la imagen infrarroja, es fácil ver que la pierna motorizada consume mucha más energía si, por ejemplo, tiene que mantener una posición doblada»







